
November 25, 2021
【研究紹介】人間を超える高速ロボット・高速知能システム(山川雄司准教授)High-speed Robots and Intelligent Systems Beyond Humans (Associate Professor YAMAKAWA, Yuji)

山川研究室では、高速ビジョンを中心として各種センサをネットワーク上に接続し、センサネットワークシステムを構築することにより実世界を高速かつ包括的に認識するとともに、アクチュエーションシステム(ロボット等)へとリアルタイムにフィードバックし、実世界との動的なインタラクション(相互作用)を実現する高速知能システムの開発を目指しています。具体的には、以下のような研究開発を進めています。観測系としては高速センサネットワークやITS応用を、駆動系としては高速動的マニピュレーションや人間ロボット協調を実現しています。
・高速センサネットワーク
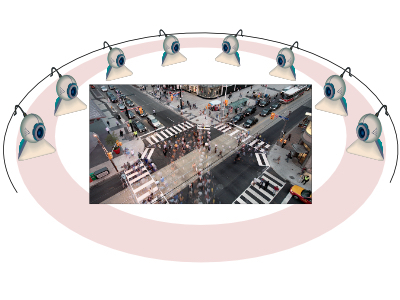
毎秒1,000枚の高速撮像と画像処理ができる計測システムを用いて、広い範囲を高速で移動する複数の対象物を検知して安定してトラッキングするアルゴリズムの提案と実システムの開発をしています。高速性とネットワーク化という特徴により、ダイナミックな運動形態を時空間的に漏れなく観測することができ、セキュリティー分野など多様なIoTシステムへの応用が期待されます。
・ITS応用
高速ビジョンを用いて、車両自身と車両を取り囲む周辺環境を高速・高精度に認識することにより、自動運転と先進運転支援システムの高度化に資するセンシング技術を研究しています。例えば、走行中の自動車から路面上の僅かな模様を捕捉・解析することで、車両姿勢や自己位置をダイナミックに推定する技術や、機械学習を高速ビジョン技術に組み込むことで高速高精度な車間距離/速度/加速度計測を可能とする技術を開発しています。
・高速動的マニピュレーション
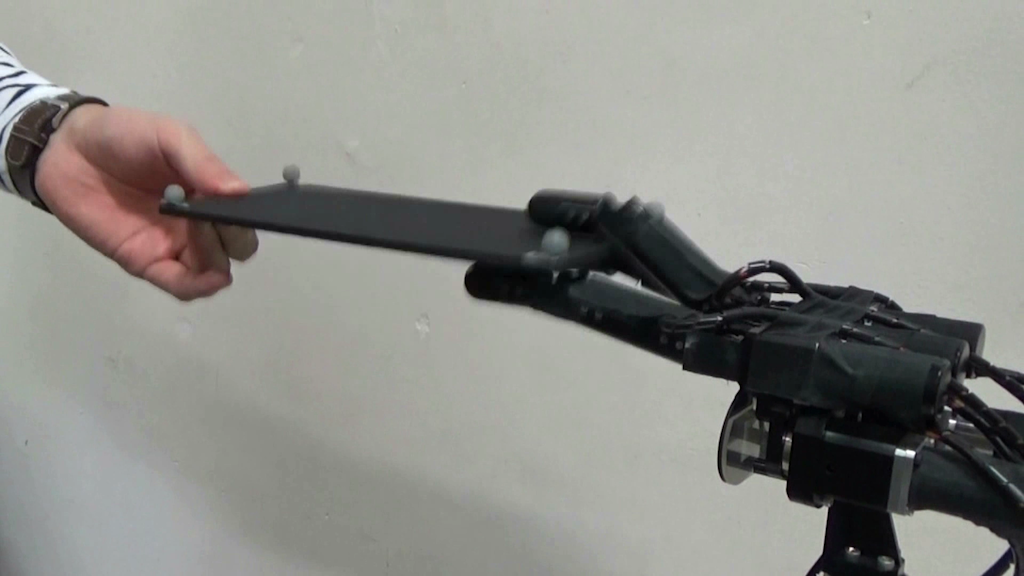
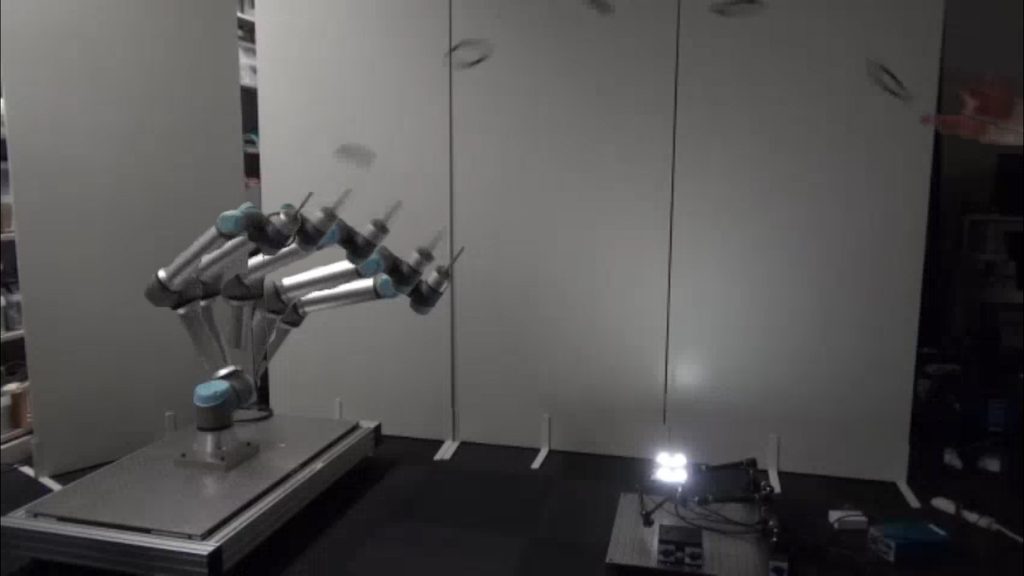
従来困難とされてきたロボットによる柔軟物の操りに着目し、高速ロボットハンドシステムを用いた柔軟物の高速操りの実現を目指しています。ロボットの高速運動性を利用することにより、ロボットの制御則や軌道生成を簡易化することに成功しています。本成果と高速視覚制御を統合し、柔軟紐の片手結び操作や布の動的折りたたみ操作を実現しています。さらに、ロボットアームによる動的ハンドリング等も実現しています。
・人間ロボット協調
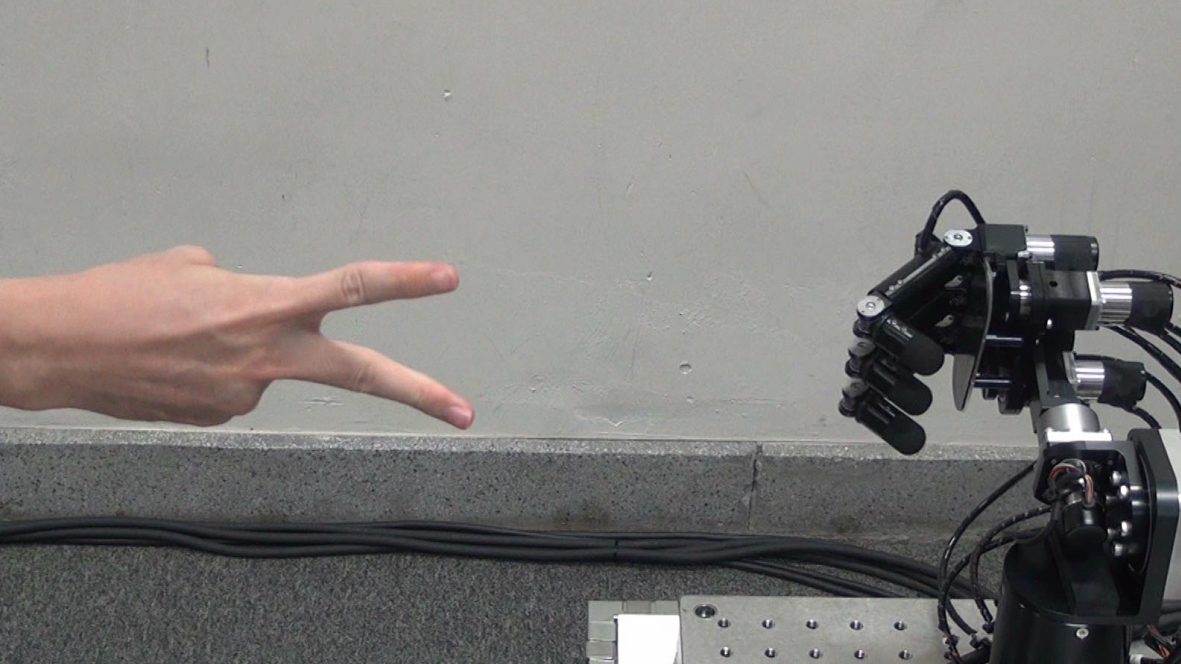
高速ビジョンと高速ロボットハンドを用いて、人間の動作に低遅延で反応し、高速に追従する技術を応用することにより,人間との協調動作・人間の作業支援・人間の運動機能拡張等を研究しています。高速性を表現する一例として開発した勝率100%じゃんけんロボットは、動画投稿サイトにおいて500万回以上の再生回数を記録し、世界中で注目されています。
記事:山川雄司(准教授)
In Yamakawa laboratory, by connecting various sensors on the network, centered on high-speed vision, we construct sensor network systems to quickly and comprehensively recognize the real world. Then we also feedback to actuation systems (robots etc.) in real time. We aim to develop high-speed intelligent systems that realize dynamic interaction. Currently, we are pursuing developments and research in the fields below. Among sensing networks, we have realized high-speed sensor networks and ITS applications. Meanwhile, we have realized actuation systems for high-speed, dynamic manipulation and human-robot interaction.
・High-speed sensor networks
In research on high-speed camera networks, we have developed a measurement system that can capture and process 1,000 images per second and are studying how to detect and stably track multiple objects in a large area. The features of high speed and networking make it possible to observe the dynamic motion of objects with seamless spatiotemporal information. Our research is expected to be applied to various IoT systems including security systems.
・ITS applications
We are investigating sensing technologies for vehicles through high-speed, high-accuracy recognition of vehicles and their surrounding environment using high-speed vision. For example, we are developing systems such as dynamic vehicle posture estimation and localization and highly accurate inter-vehicle distance/velocity/acceleration estimation for the next-generation’s intelligent transport systems.
・High-speed, dynamic manipulation
We focus on flexible object manipulation, which is considered to be difficult for robots to perform, and we aim to achieve dynamic and high-speed manipulation of flexible objects. In previous research, we achieved one-handed knotting of a flexible rope and dynamic folding of a cloth using a high-speed robot hand system. In addition, we achieved high-speed, dynamic manipulation (for example, ring catching) by a robot arm.
・Human-robot interaction
We are conducting research on human-robot cooperation, assistance systems and human motion enhancement using a super-low-latency and real-time human-robot interaction system implementing high-speed vision and high speed-robot hands. As an example of such implementation, we have developed a janken (rock-paper-scissors) robot with a 100% winning rate.
Text: Yuji Yamakawa (Associate professor)
English proofreading: David Buist (Senior project specialist)
主担当教員Associated Faculty Members

准教授
山川 雄司
- 先端表現情報学コース
Associate Professor
YAMAKAWA, Yuji
- Emerging design and informatics course